设计算法让道德价值与个人私利之间保持一致是很困难的,因而要解决无人车面临的伦理问题道阻且长。
2018年刚开年,无人车领域就出了一个大新闻:Google旗下的无人车公司Waymo预计在今年推出无人车的共享出行平台,这标志着无人车的商业化进入了关键时期。
面对这一关键时期,无论是传统汽车厂商还是互联网巨头,都在逐步进行无人驾驶领域的战略布局和规划。
基于此,本文从融资情况、主要研究技术和所遇困境三方面,对无人车创业公司进行了盘点。以下,enjoy~
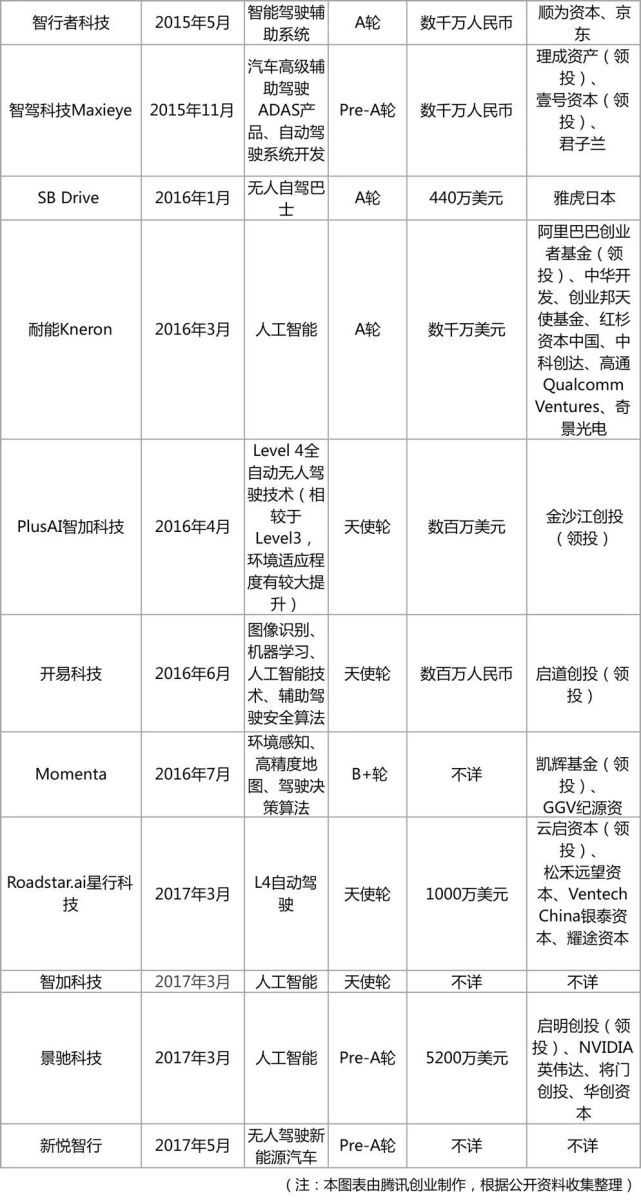
一、17家创业公司与数亿融资
下图是根据公开资料不完全整理,从公司的成立时间、企业类型、融资情况及金额、轮次等方面对无人车创业公司的融资现状进行了总结。
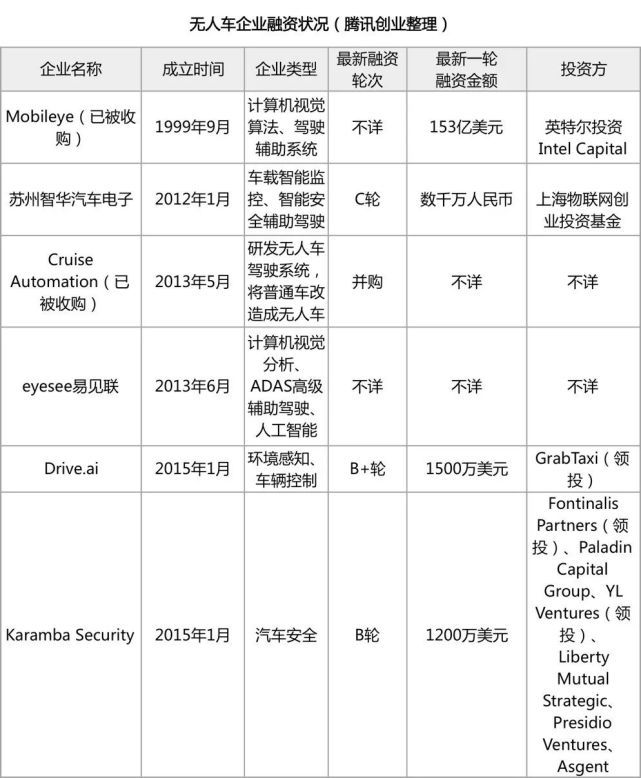
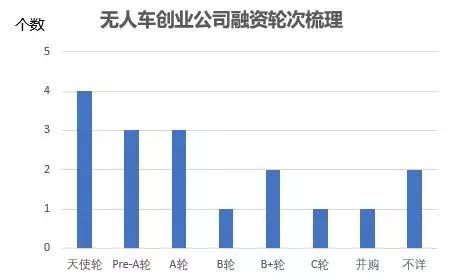
1、无人车创业公司融资轮次整理
已披露融资情况的创业公司约17家,其中大部分处于天使轮和A轮,速度最快的公司已到C轮。
2、无人车创业公司创立时间
从成立时间上看,最早的无人车创业公司Mobileye成立于1999年。Mobileye公司成立之初,是想做汽车的眼睛,也就是帮助汽车建立视觉系统,识别周围障碍物,进而降低交通事故频次。
其他公司大多成立于2012年及以后,相比之前,2015~2017年公司数量陡增。
二、无人车公司主要研究技术
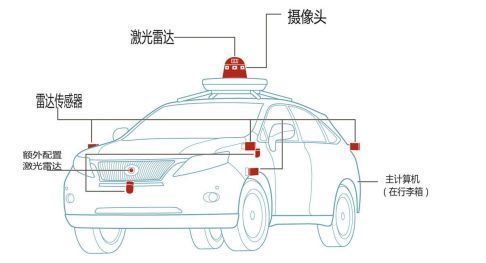
无人车是一个非常完备复杂的系统,其上路需要很多技术的支持。其中环境感知技术、车辆定位技术和车辆控制技术,对于汽车实现无人驾驶起着至关重要的作用。
环境感知技术和车辆定位技术相当于无人车的“眼睛”,是无人车得以上路的前提。车载传感系统可以定位车辆位置,从而帮助车辆感知道路、车辆等周围环境。
车辆控制技术相当于无人车的“大脑”,会根据路况自动规划行驶路线,自动控制车辆的驱动速度、转向和制动,让车辆安全行驶。
根据各无人车创业公司在技术开发研究方面的倾向性,可以把它们划分为以下几类:
1、环境感知技术
无人车先要能够识别街道范围、信号灯、路标等,然后才能判断应该停止还是前进。

(图片来自网络)
环境感知技术主要是帮助无人车识别周边的环境,对路上物体进行探测和归类,它还可以持续测算物体的速度、方向和加速度。
这种技术能够有效避免路面上其它车道标志的干扰,满足了高速无人车自主行驶的实时性需求。
(图片来自网络)
当前博世正在开发新一代雷达,视角会从90°扩大到100°,带宽从1G 变为1.5G,角分辨率也进一步增加。
整个雷达做得更薄、耗能更低、更易于安装,同时主要针对自动驾驶方向来设计,可以在复杂场景下识别更多目标,更准确地测量速度和距离。
此外,博世新一代摄像头,聚合了人工智能和深度学习算法等,使得像素提升至 200 万,视场角也翻倍了。
智驾科技Maxieye也致力于此,用较低成本的摄像头对前方道路环境进行实时监测,并配以算法识别出车道线和前方车辆,当达到预警级别时,系统会触发指令,从而实现车道偏离警告、前车防撞等ADAS功能。
Mobileye公司的产品相当于自动驾驶汽车的“眼睛”和“大脑”,能够帮助无人车识别周围环境以及做出判断。
该公司主要研发与计算机视觉有关的自动驾驶技术,该公司推出了专用的计算机视觉处理芯片,这些芯片结合识别系统能够识别各种道路交通状态,可以对道路环境、交通参与者、意外情况进行快速分析。
2、车辆定位技术
车辆定位技术可以向汽车操作系统传输道路信息,比如障碍物位置、行驶方向、高速公路出口等等。
高精度地图是 Roadstar.ai公司 L4 级别自动驾驶技术的关键基础,关于高精度地图以及精确空间定位在无人驾驶中的重要性,周光表示地图定位其实就是静态的感知。
比如当知道两边有路灯的时候,就不用再去识别它了,相当于简化了识别问题。这样,更多的算力可以用于解决其他更复杂的问题。就是说如果技术达到一定的程度,其实不用地图也是可以,只是那样可能会慢一点。

(Roadstar.ai原型车上的“车顶盒”,图片来自雷锋网)
智行者科技公司在2017年9月推出了旗下首辆无人驾驶扫路车“蜗小白”,并落地北京奥林匹克森林公园。这辆扫路车是三家公司合作的产物,其中车辆本身由海德公司提供,百度提供高精度地图,智行者科技主要负责这辆车的自动驾驶解决方案。
针对公园里树木枝繁叶茂这样的复杂场景,智行者科技公司采用了 GPS + LiDAR 的融合定位方式。定位系统安装位置也很考究,安装在车辆垂直方向的中部,主要是为了更为精准的探测到在公园内嬉戏的小孩。
3、车辆控制技术
车辆控制技术能够帮助车辆实现速度控制和方向控制,使车辆能够自动完成减速、变道、转向、超车等一系列操作。

(无人车内部的控制电脑,图片来自SUV汽车网)
硅谷的创新公司PlusAI研发的无人车通过人工智能深度学习算法,能够像人一样进行实时的数据采集和处理,对新场景具有出色的总结、学习和适应能力,极少依赖与预先收集的地图数。
凭借独特的技术优势,PlusAI的无人车能够做到无需高精地图,在极其特殊的恶劣环境下,实现高速公路上速度达95公里以上的平稳操控,更在弯曲、上下坡、无分割区、夜晚、拥堵路段等不同真实高速场景表现均极为出色。
Momenta团队源自清华大学和微软亚洲研究院,致力于打造自动驾驶大脑。基于环境感知、高精度地图和驾驶决策算法,为无人车提供自动驾驶方案以及大数据服务。
三、两大发展困境
无人驾驶汽车一定会实现,这大约已经是所有科技和汽车行业从业者的共识。很多人认为无人车会在不久的将来统治汽车领域,不过理想很丰满,现实很残酷,有很多因素制约无人车走进千家万户。
一方面,无人驾驶技术还不够成熟。
环境感知技术虽然可以帮助无人车识别交通信号灯和车道标识,但是在断电或者车道标识模糊不清的时候,无人车该怎样制定正确的行驶决策?
要解决这一技术难题,需要将人类的直觉和与其他车辆的配合能力传授给机器,让机器逐步学会自主判断。
另一方面,无人车的发展面临着伦理难题。
美国《科学》杂志上的调查指出,无人车由于采用自动驾驶系统,有望让交通事故数量减少90%。但是并非所有的车祸都能避免,在某些撞车事故中,无人车需要做出困难的伦理抉择。
例如,在某些紧急情况下,面对牺牲车上乘客保护路人还是牺牲路人保护乘客的难题时,无人驾驶车该怎么决策?
针对无人车推广面临的伦理困境,麻省理工学院副教授伊亚德·拉赫万解释说:“多数人都想生活在汽车伤亡最小化的世界里,但他们又希望车能不惜任何代价地保护自己。如果每个人都这样做,那么结果就将是个悲剧。”
设计算法让道德价值与个人私利之间保持一致是很困难的,因而要解决无人车面临的伦理问题道阻且长。
无人车已经汽车行业未来的发展趋势,先进的人工智能技术无疑给无人驾驶带来一场技术革命,创造出巨大价值。
但是无人车也面临着技术和伦理道德的困境,这些困境制约着无人车的推广和运营。只有解决了这些困境,才能推动无人车行业更好的发展。